Skeleton system
What is a MANUS Skeleton
When using glove data to drive the animation of a model, you commonly run into mismatches. Be it, the dimensions of the model don't match, the bone names don't match etcetera. The skeleton system is our answer to tackle that issue. It's a system to retarget our data (be it glove or body) onto the model of your choosing.
Structure
Skeleton Types
There are several types of skeletons, the skeleton type will determine what type of animation can drive it.
Hand, a hand skeleton will only ever animate the hands, useful when only animating hands or using a different animation system for driving the body.Body, a body skeleton will only ever animate the body without hands or face.Both, this skeleton type will animate the entire body, hands and body. Facial animation is not something handled by the skeleton system.
Nodes
Nodes are the joints of the skeleton (the point around which your bones rotate).
A node consists of the following properties.
| Property | Description |
|---|---|
| ID | Unique identifier of the node |
| Name | Name of the node, only relevant for human readability |
| Position | Position of the node |
| Rotation | Rotation of the node represented as a Quaternion |
| ParentID | ID of the parent node (0 or its own ID when no parent) |
Coordinate-system
Position and rotation will use the coordinate system based on the type specified by the Session (World / Local). This is specified when creating the session.
Chains
Chains are a combination of nodes, representing a body part. For instance an arm chain consists of the shoulder, elbow and wrist nodes, creating an ik-chain that can then be used to drive the animation.
Types of chains
The table below describes all the chain types. Chain types can also have a side to them.
| Chain type | Description | Full body requirement | Hands only requirement | Sidedness |
|---|---|---|---|---|
Hand |
Node containing hand/wrist , usually only one | |||
FingerThumb |
All nodes representing the thumb | |||
FingerIndex |
All nodes representing the index finger | |||
FingerMiddle |
All nodes representing the middle finger | |||
FingerRing |
All nodes representing the ring finger | |||
FingerPinky |
All nodes representing the pinky finger | |||
Head |
Node containing the head, usually only one | |||
Neck |
Nodes containing the neck, usually the neck and head nodes | |||
Shoulder |
Contains the shoulder bones, from clavicle to upper arm | |||
Arm |
Contains the arm nodes, starts at the upper arm and ends at the hand | |||
Spine |
Contains the spine nodes, starts at the pelvis and ends at the neck | |||
Pelvis |
Node containing the pelvis, usually only one | |||
Leg |
Contains the leg nodes, starts at thigh and ends at the foot | |||
Foot |
Node containing the foot, usually only one | |||
Toe |
Node containing the toe, usually only one |
Finger-requirements
A minimum of two finger chains and a thumb chain are required for hand animation, it does not matter which fingers specifically.
Setting up a skeleton
Now that we've covered the basics requirements of a Skeleton it's time to set one up. For this there are two methods, manually defining the entire structure or using the DevTools in conjunction with our Unity or Unreal plugins.
Code (SDK)
The SDK Client example has an entire chapter on how to set up and use skeletons. This method of implementation is supported by all plugins (SDK, Unreal, Unity).
DevTools (Unity / Unreal)
When setting up a 3D model for animation in combination with our Unity and Unreal plugins, it's however highly advisable to use our DevTools application. This automates a big part of the process. Please refer to its documentation for specific steps how to use the DevTools to configure skeletons.
Note
Currently loading FBX files directly into the DevTools for skeleton creation is not supported.
Target types
There are several ways to specify how the skeleton is driven. Directly via DeviceID or via the User system.
| Target types | Parameter | Description |
|---|---|---|
| User Data | UserID | Data is applied based on the specified UserID, assigned glove data is used to drive the skeleton |
| User Index Data | User Index | Identical to UserID but the UserID is based off the Index (0 = first user, 1 = second user) |
| Glove Data | GloveID | Data is applied based on deviceID |
Note
In the past it was also possible to drive the skeleton based off recorded animation data. This is no longer supported.
Settings
After defining all the skeleton's nodes and chains there are several settings that allow you to tweak the retargeting based on your intended goal and target model.
Skeleton
Use end point approximation (bool)
Use end-point approximation increases the weight on the solve towards accurate finger end-point precision over joint angle accuracy. Leaving this off will give you the most realistic joint angles and turning this on will give you the most true to life finger tip positions.
Note
For accurate end-to-end finger positions, leaf bones are a requirement.
Scale skeleton (bool)
Scale skeleton will scale the bones in the skeleton to match the user's dimensions. This will size the skeleton more true to the user's actual dimensions but might result in scaling issues when the model is stretched or squashed beyond what is acceptable.
Hand
Finger bones
Hand chain ID
uint ID of hand chain
Metacarpal bones
bool First node of the finger chain is metacarpal bone
Metacarpal bone ID
uint Node ID of metacarpal bone
Use leaf at end
bool Will use the last node in the chain and read its leaf settings. The leaf direction and leaf
Leaf direction
Vector3 Directional vector of the fingertip in local space.
Leaf length
float Length of fingertip in the integration's unit scale. This will be meters for SDK and Unity and centimeters for Unreal.
Hand motion
Specifies what drives wrist rotation and positioning.
| Hand Motion | Description |
|---|---|
| None | Hand will not transform |
| IMU | Hand / Wrist rotates based on glove device IMU data |
| Tracker | Hand / Wrist rotates and positions based on assigned tracker data |
| TrackerRotationOnly | Hand / Wrist rotates based on assigned tracker data |
| Auto | Hand / Wrist switches between IMU and Tracker based on data availability |
Head
Head pitch offset (float)
float Changes the head node pitch offset, value is in degrees.
Head yaw offset
float Changes the head node yaw offset, value is in degrees.
Head tilt offset
float Changes the head tilt/roll offset, value is in degrees.
Use leaf at end
bool Similarly to how this works for fingers, the head "tip" node is added. This data is to match the scale of the head to the user's dimensions. Only works if scale to target is enabled.
Neck
Neck bend offset
float Changes the neck tilt offset, value is in degrees.
Shoulder
Forward offset
float Rotates the shoulders into the forward direction, value is in degrees.
Shrug offset
float Rotates the shoulders into the up direction, value is in degrees.
Forward multiplier
float Allows for fine tuning of shoulder forward rotation severity. Default is 1, value at 0 will lock the forward rotation in place.
Shrug multiplier
float Allows for fine tuning of shoulder up rotation severity. Default is 1, value at 0 will lock the forward rotation in place.
Arm
Elbow rotation offset
float Rotates the elbow around the directional axis of the arm, value is in degrees.
Arm length multiplier
float Scales the end position of the arm. This does not scale the model / bones themselves but modifies the reach of the arm. Default is 1 and multiplies accordingly.
Arm rotation offset
Vector3 Modifies the rotation of the arm, X represents the yaw, Y represents the pitch and Z represents the roll. Expressed in degrees.
Position offset
Vector3 Offsets the hand target position, value is in the integration's unit scale. This will be meters for SDK and Unity and centimeters for Unreal.
Position multiplier
float Multiplier for the endpoint direction. Default is 1 and multiplies accordingly.
Spine
Spine bend offset
float Changes the spine tilt offset, value is in degrees.
Pelvis
Hip Height multiplier
float Changes the hip height, does not change the leg length. Default is 1 and multiplies accordingly.
Hip bend offset
float Changes the hip tilt offset, value is in degrees.
Thickness multiplier
float Changes the forward and up scales for the model. Only works if scale to target is enabled. Default is 1 and multiplies accordingly.
Leg
Reverse knee direction
bool Reverses the direction the knee bends.
Knee rotation offset
float Rotates the knee around the directional axis of the leg, value is in degrees.
Foot forward offset
float Offsets the foot forward position, value is in the integration's unit scale.
Foot side offset
float Offsets the foot sideways' position, value is in the integration's unit scale.
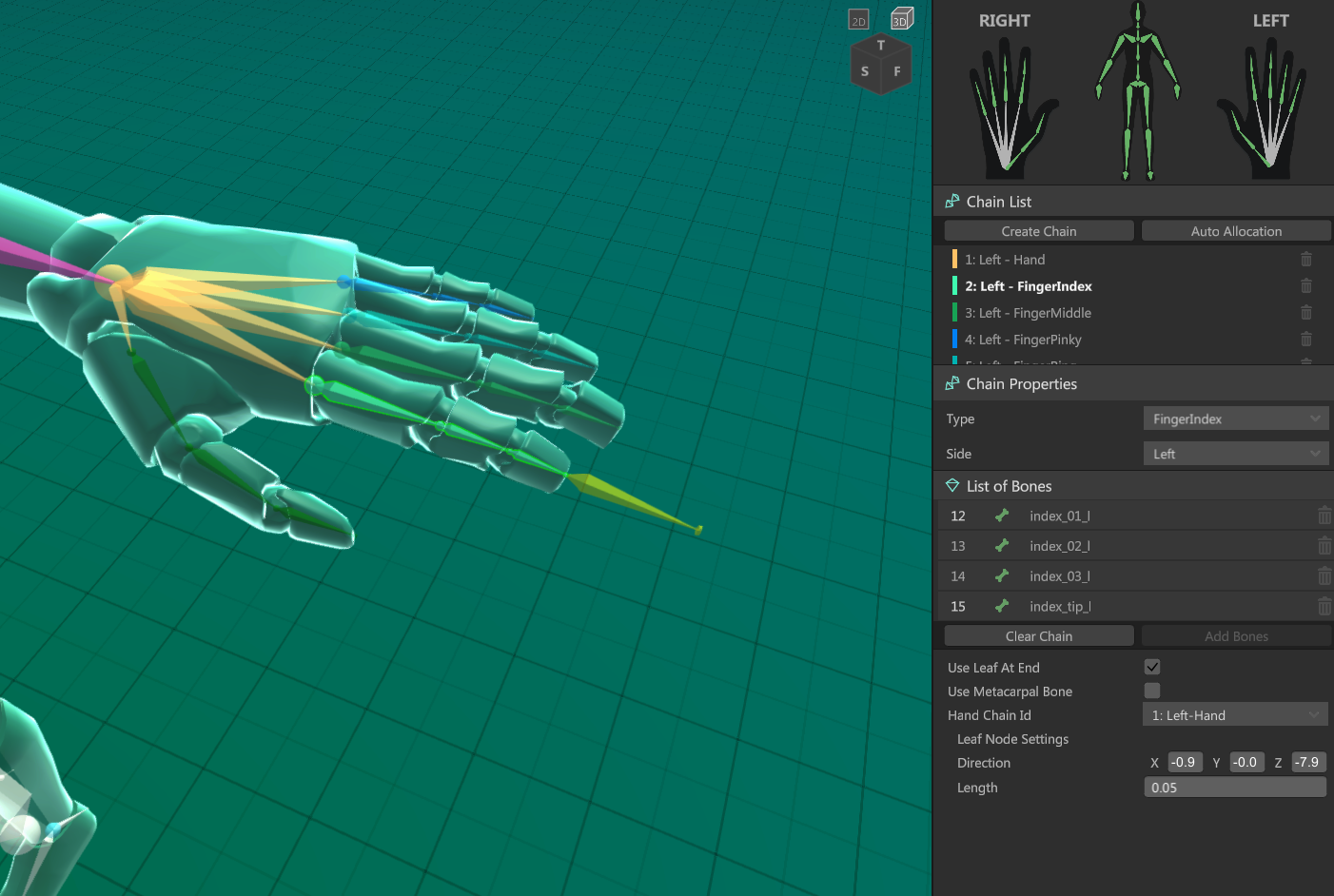
Finger leaf bones
It is highly advised for the finger skeletal structure to also contain tip leaf bones. For our skeletal solver to correctly solve for finger point interactions it requires tip bones to know where the finger ends. The finger chain settings do allow for the addition of tip leaf bones when the model does not have them.
Skeleton types
There are three different skeletons in MANUS Core: Retargeted Skeletons, Raw Skeletons and Temporary Skeletons.
Retargeted Skeletons
Retargeted skeletons are the skeletons this article has been mainly about. The data that is streamed out to the plugins and animates your models are these skeletons.
Raw Skeletons
The Raw skeletons are Core's internal representations of the glove data. Internally a skeleton is made using the device's sensor data and calibration values. This data is streamed out per device over the so called RawSkeletonStream. Please refer to the SDK Client documentation for more in depth information.
Temporary Skeletons
Temporary skeletons are the temporary definitions of a skeleton while they're still being built up and not yet ready to be animated.
mskl files
Skeletons can be saved to our mskl (Manus Skeleton) file format. These files can then be loaded and re-used for models. Opening these files will open the MANUS DevTools for you to edit them, and they can be saved back to mskl files.
These files can be loaded from SDK, Unity and Unreal plugins to improve the flow when re-using models.
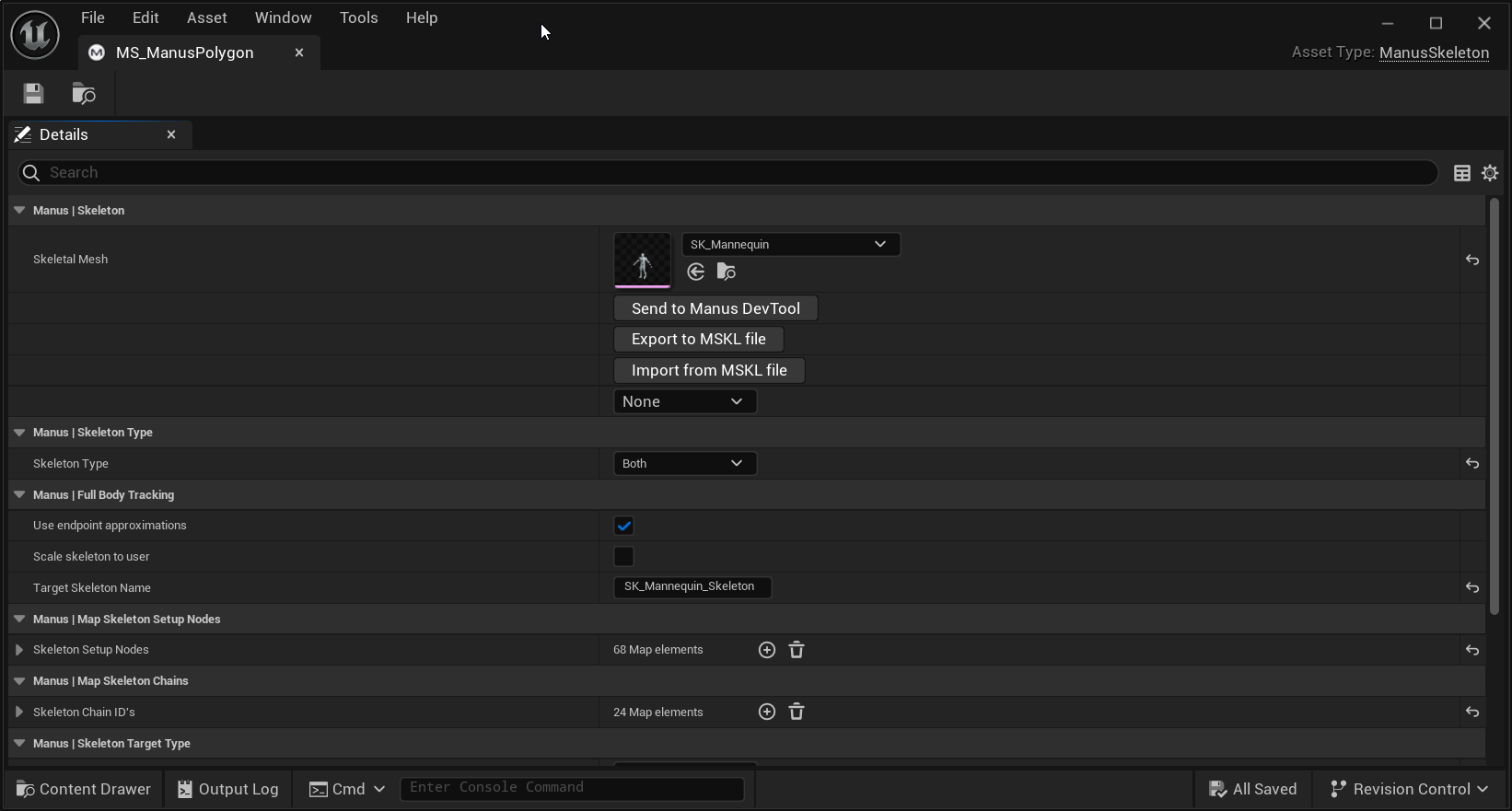
Loading in Unreal
In Unreal open your MANUS Skeleton, there you are able to import and export an mskl file for the used skeletal mesh.
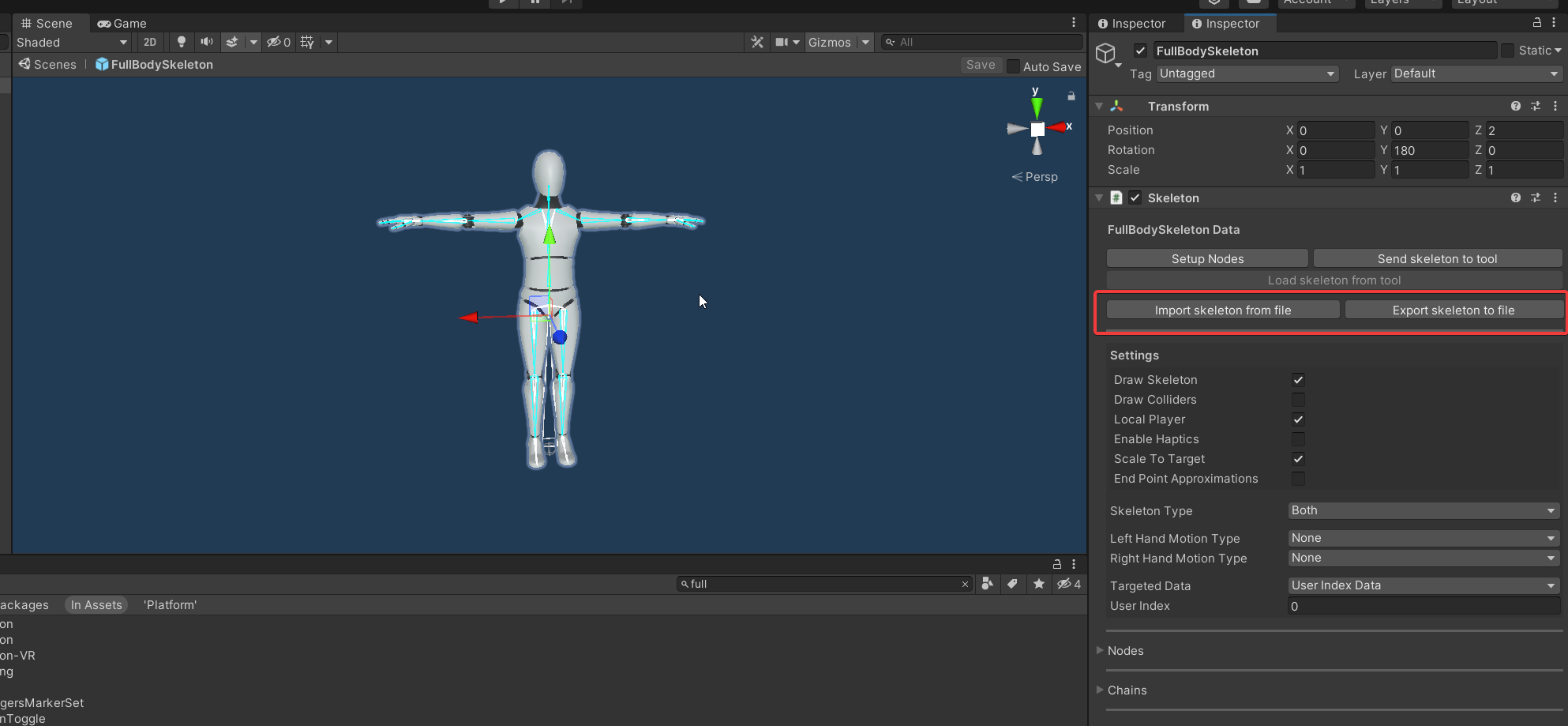
Loading in Unity
In Unity the MANUS skeleton component has the ability to load and save mskl files.
Loading in SDK
Loading mskl files in the SDK is a bit more involved. The SDK Client has example code how to load mskl files.
void SDKClient::GetTemporarySkeletonFromFile()
{
// this example shows how to load a temporary skeleton data from a file
// as an example we try to get the temporary skeleton data previously saved as .mskl file in directory Documents/ManusTemporarySkeleton
// get the path for the documents directory
std::string t_DirectoryPathString = GetDocumentsDirectoryPath_UTF8();
// check if directory exists
std::string t_DirectoryPath =
t_DirectoryPathString
+ s_SlashForFilesystemPath
+ "ManusTemporarySkeleton";
if (!DoesFolderOrFileExist(t_DirectoryPath))
{
SPDLOG_WARN("Failed to read from client file, the mentioned directory does not exist");
return;
}
// create string with file name
std::string t_DirectoryPathAndFileName =
t_DirectoryPath
+ s_SlashForFilesystemPath
+ "TemporarySkeleton.mskl";
// read from file
std::ifstream t_File = GetInputFileStream(t_DirectoryPathAndFileName);
if (!t_File)
{
SPDLOG_WARN("Failed to read from client file, the file does not exist in the mentioned directory");
return;
}
// get file dimension
t_File.seekg(0, t_File.end);
int t_FileLength = (int)t_File.tellg();
t_File.seekg(0, t_File.beg);
// get temporary skeleton data from file
unsigned char* t_TemporarySkeletonData = new unsigned char[t_FileLength];
t_File.read((char*)t_TemporarySkeletonData, t_FileLength);
t_File.close();
// save the zipped temporary skeleton information, they will be used internally for sending the data to Core
uint32_t t_TemporarySkeletonLengthInBytes = t_FileLength;
if (t_TemporarySkeletonData == nullptr)
{
SPDLOG_WARN("Failed to read the compressed temporary skeleton data from file");
delete[] t_TemporarySkeletonData;
return;
}
// create a skeleton setup where we will store the temporary skeleton retrieved from file
SkeletonSetupInfo t_SKL;
SkeletonSetupInfo_Init(&t_SKL);
uint32_t t_SklIndex = 0;
SDKReturnCode t_Res = CoreSdk_CreateSkeletonSetup(t_SKL, &t_SklIndex);
if (t_Res != SDKReturnCode::SDKReturnCode_Success)
{
spdlog::error("Failed to Create Skeleton Setup. The error given was {}.", t_Res);
return;
}
m_TemporarySkeletons.push_back(t_SklIndex);
// associate the retrieved temporary skeleton to the current session id
uint32_t t_SessionId = m_SessionId;
// load the temporary skeleton data retrieved from the zipped file and save it with index t_SklIndex and session id of the current session
SDKReturnCode t_Result = CoreSdk_GetTemporarySkeletonFromCompressedData(t_SklIndex, t_SessionId, t_TemporarySkeletonData, t_TemporarySkeletonLengthInBytes);
if (t_Result != SDKReturnCode::SDKReturnCode_Success)
{
SPDLOG_WARN("Failed to load temporary skeleton data from client file in Core, the error code was: {}.", t_Result);
return;
}
delete[] t_TemporarySkeletonData;
}
Troubleshooting
Skeleton does not animate
If the skeleton does not animate. You can verify if a skeleton is setup correctly within the DevTools. In the left bottom corner of the viewport you are able to playback several animations. If the skeleton does animate in this view but not in your other implementation, make sure the target type is set correctly. If your skeleton also does not animate within the DevTools animation view it means the chain setup is probably configured incorrectly. Please make sure you minimally have all the chains required for your use case.
Pinches don't look correct
If the finger end point interations do not seem to be lining up correctly but they are fine within MANUS Core Dashboard. Make sure your skeleton has finger tips setup correctly, to improve end-point interactions, end point approximation and scale to target can be enabled.